制約環境下におけるドローンの性能評価法の研究開発
本研究開発に関する活動状況・お知らせ、関係リンク
研究開発の概要
実施体制
-
名古屋工業大学[コンソ統括、③担当]、日本原子力研究開発機構[①-(1)担当] 、新潟工科大学[①-(2)担当]
近畿大学[①-(3)担当] 、千葉大学(再委託:株式会社Liberaware) [②担当] 、産業技術総合研究所[④担当] 契約種別
委託
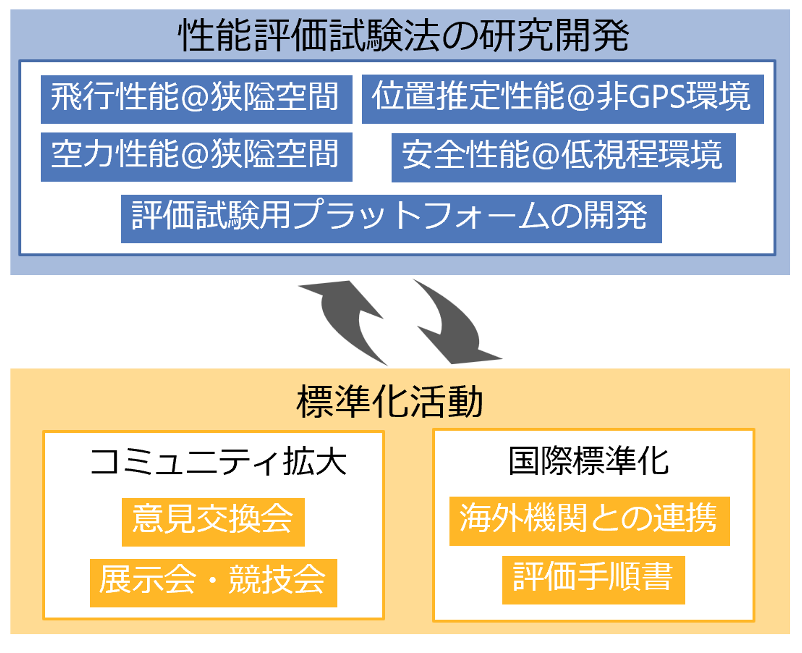
研究開発の概要
-
①.狭隘空間におけるドローンの飛行性能評価手法の開発
飛行運動制御性能(1)、空間の特徴や複雑さ(2)、作業目的付与による影響(3)を定量化し、狭隘空間でのドローンの飛行性能評価手法を開発
②.狭隘空間における小型ドローンの空力性能評価方法および評価試験用プラットフォームの開発
狭隘空間で発生する各種空力効果を考慮した空力特性評価法の開発および狭隘空間での性能評価試験に適したプラットフォームの開発
③.非GPS環境における自己位置推定機能の性能評価試験法の研究開発
非GPS環境という制約に加え、低視程環境と移動障害物も制約として考慮するドローンの自己位置推定機能の性能評価法の開発
④.低視程環境における障害物検知センサに関する性能評価手法の開発
低視程試験空間で障害物検知実験を実施し、安全性能に影響を及ぼす環境要因を分析し、障害物検知センサに関する性能評価手法を開発
中間目標(2024年度)
① 各種定量化により試験方法の基本部分を構築
② 供試ドローン開発と空力効果単独時の空力特性評価方法の開発
③ 低視程環境での位置推定性能評価手法を開発
④ 障害物検知センサの性能評価手法を開発最終目標(2026年度)
① 研究開発項目①内の成果の統合による実施手順書の作成
② 空力効果複合時の空力特性評価方法の開発
③ 移動障害物環境での位置推定性能評価手法を開発
④ 安全性能を定量的に評価できる試験法の開発 -