リモートIDを利用したドローンの1対多運航制御システム及び要素技術開発
本研究開発に関する活動状況・お知らせ、関係リンク
活動状況・お知らせ、関係リンクはありません。
研究開発の概要
実施体制
-
助成先:イームズロボティクス株式会社
再委託先:アルプスアルパイン株式会社、国立研究開発法人産業技術総合研究所 契約種別
補助
研究開発の概要
-
①リモートIDの受送信機能を使った1対多運航制御システムの検討
リモートIDの受送信機能を使った多運航ドローン制御システム
②リモートID通信方式応用による、機体間(V2X)通信システム構築
受信、測距機能をリモートIDに実装し、複数機体の位置情報を把握する手法の開発
③自律分散手法を用いた長距離テレメトリシステムの開発
920MHzLoRAで最大10㎞までの機体間通信を可能にする。
④グローバル位置情報とローカル位置情報の相互補完による自律群制御システムの開発
リモートID、920MHzLoRAによる自律的な衝突回避システムの実現。
➄機体認証制度型式認証一種カテゴリーⅢ取得
レベル4を可能にする型式認証一種の取得。
⑥カテゴリⅡ、Ⅲによる1対多運航実証試験
災害対応、目視外飛行による物流を想定したユースケースで試験実施する。
-
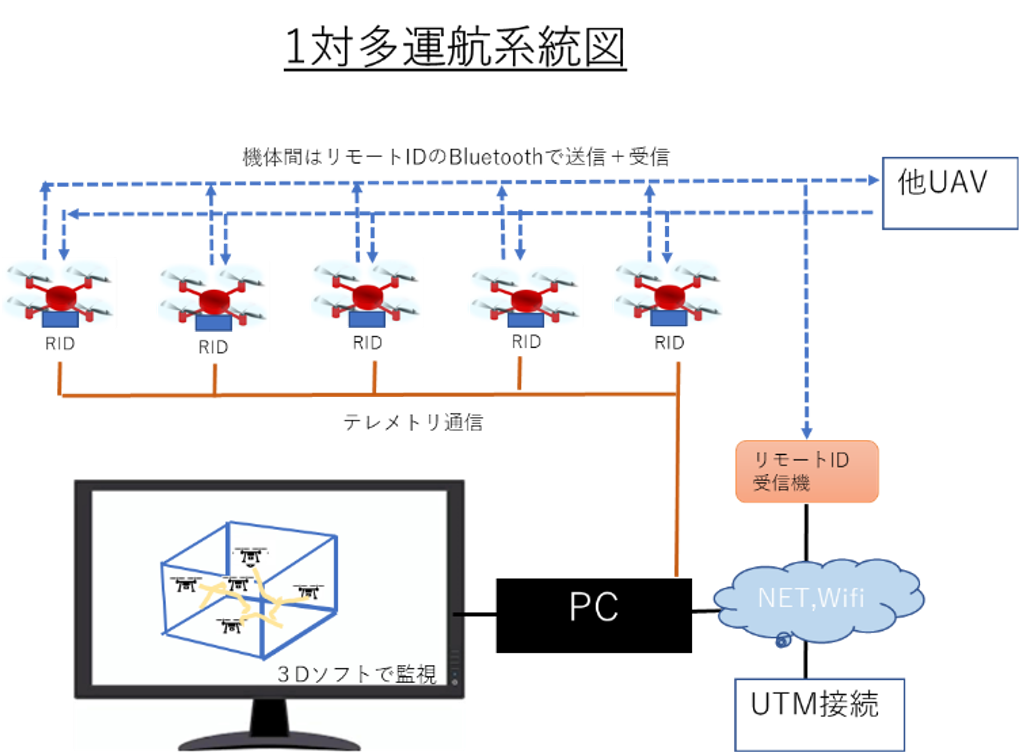 注記)UAV:無人航空機、RID:リモートID、UTM:統合脅威管理 (ドローンの運航管理システムを指す)
注記)UAV:無人航空機、RID:リモートID、UTM:統合脅威管理 (ドローンの運航管理システムを指す)
最終目標(2024年度)
- 中山間地など目視外飛行を含む多運航による物流定期便の開始
- 点検、警備、災害対応等、飛行時間の短いドローン欠点をカバーする複数機による多運航プロジェクト実現
-