高密度飛行を目指したエッジとクラウドのAI・最適化による衝突回避と運航管理の研究
本研究開発に関する活動状況・お知らせ、関係リンク
活動状況・お知らせ、関係リンクはありません。
研究開発の概要
実施体制
-
一般財団法人先端ロボティクス財団
(再委託:国立大学法人千葉大学、大学共同利用機関法人情報・システム研究機構 (国立情報学研究所) (2024年度終了)) 契約種別
委託
研究開発の概要
-
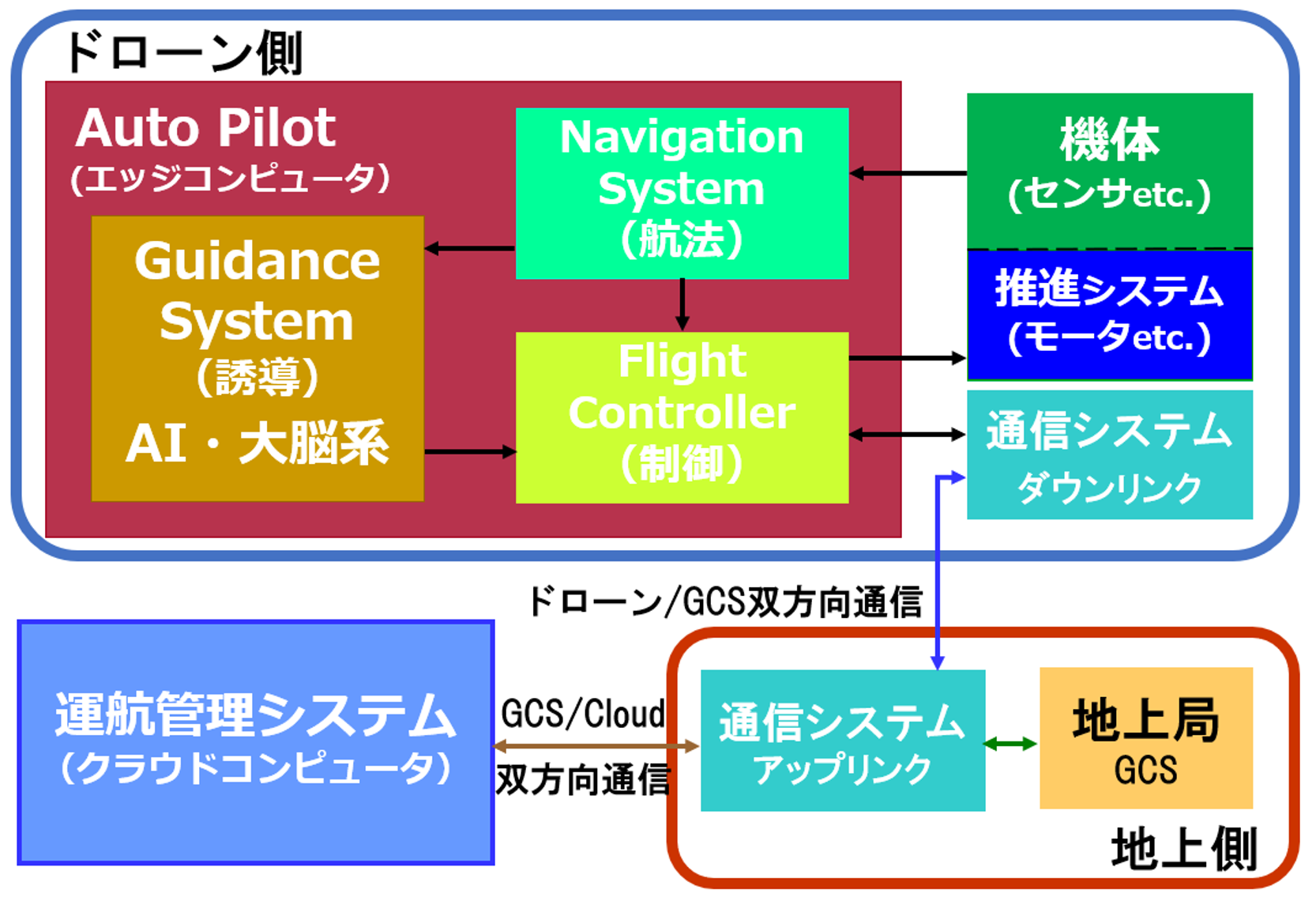
Stage-1(2022-23年度):冗長型オートパイロットの開発
- AIによる不時着地点判別・誘導
- ワンフェイルオペラティブ飛行
Stage-2(2024年度):知能型オートパイロットの開発
- AIによる障害物認識、経路生成
- 障害物との衝突回避飛行制御
Stage-3(2025年度):統合型オートパイロットの開発
- ダイナミックマップ対応機能
Stage-4(2026年度):拡張型オートパイロットの開発
- エッジ・クラウド協調システム
中間目標(2024年度)
- Stage-1、2の内容(不時着地点探索、異常検知、障害物認識、衝突回避制御、One Fail Operative機能等)の達成
- AI実装型の知能オートパイロットとして、DAA(Detect and Avoid)機能を有する知能型オートパイロットを実現
最終目標(2026年度)
- Stage-3、4の内容(ダイナミックマップ対応の飛行ルート探索、生成、自律飛行制御等)の達成
- 知能オートパイロットの高度化、エッジ・クラウド協調による空域ゾーニングに対応する運航管理システムの実現