- TOP
- Project Outline
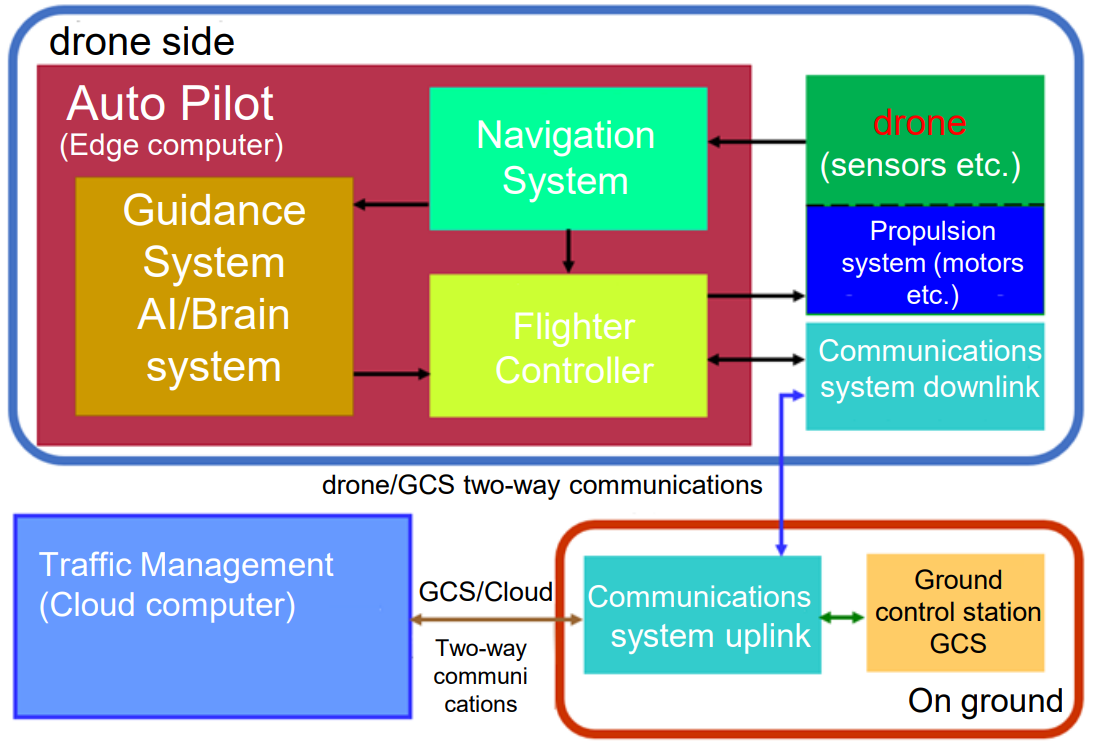
- Research on detect and avoid, and flight operation system for high density operation using AI and optimized edge/cloud computers
Research on detect and avoid, and flight operation system for high density operation using AI and optimized edge/cloud computers
Project details
Participation
-
Advanced Robotics Foundation
(Subconsigned to: Chiba University and the National Institute of Informatics (Inter-University Research Institute) Contract Type
Entrustment
Project details
-
Stage-1: Development of redundant autopilot(1)
- AI-based fault diagnostics(2), emergency landing point identification and navigation(3), climate response(4)
- Separation control of multiple drones(5), One Fail Operative flight(6)
Stage-2: Development of intelligent autopilot(7)
- AI-based obstacle recognition and avoidance rerouting(8)
- detect and avoid flight control with obstacles(9)
- International standardization activities (ideal approach to detect and avoid)(10)
Stage-3: Development of integrated autopilot(11)
- Dynamic map-compatible optimal route search(12), flight control(13)
Stage-4: Development of scalable autopilot(15)
- Edge/cloud collaborative AI(16), flight control(17), flight operation system(18)
- International standardization activities (airspace zoning etc.)(19)
Mid-term goals (FY2024)
- Achieve contents of Stages 1 and 2 (emergency landing point search, fault detection, obstacle recognition, detect and avoid control, One Fail Operative, etc.)
- Enable AI-implemented intelligent autopilot with Detect and Avoid (DAA)
Final goals (FY2026)
- Achieve contents of Stages 3 and 4 (search, plot, and autonomous flight control of flight routes compatible with dynamic maps)
- Advancement of intelligent autopilot, and implementation of flight operation system in response to airspace zoning by collaborate edge/cloud computing
")