- TOP
- Project Outline
- R&D of performance evaluation methods for drone under restricted environmental conditions
R&D of performance evaluation methods for drone under restricted environmental conditions
Project details
Participation
-
Nagoya Institute of Technology [consortium leader, in charge of (3)], Japan Atomic Energy Agency [in charge of (1)-1], Niigata Institute of Technology [in charge of (1)-2]
Kindai University [in charge of (1)-3], Chiba University (subconsigned to: Liberaware Co., Ltd [in charge of (2)], National Institute of Advanced Industrial Science and Technology [in charge of (4)] Contract Type
Entrustment
Project details
-
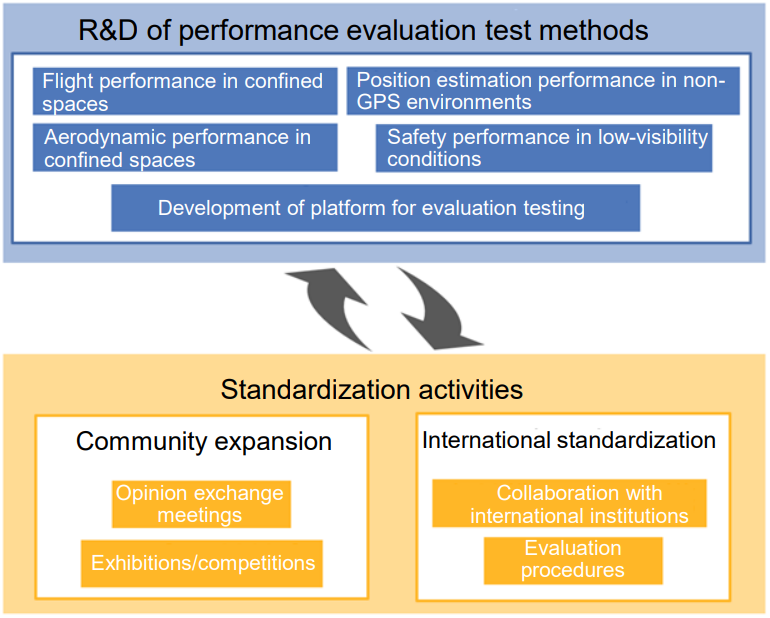
(1) Development of method for evaluating flight performance of drones in confined spaces
Develop a method for evaluating flight performance of drones in confined spaces by quantifying: 1) flight motion control performance, 2) space characteristics and complexity, and 3) impact of work purpose assignment.
(2) Development of evaluation testing platform and method for evaluating aerodynamic performance of small drones in confined spaces
Development of method for evaluating aerodynamic characteristics based on various aerodynamic effects that occur in confined spaces, and development of a platform suitable for performance evaluation testing in confined spaces
(3) R&D for performance evaluation testing method for own-position estimation in a non-GPS environment
Development of performance evaluation methods for the drone’s own-position estimation with consideration of low-visibility conditions and moving obstacles as constraints in addition to the constraints of a non-GPS environmental conditions
(4) Development of performance evaluation methods related to obstacle detection sensors in low-visibility conditions
Develop performance evaluation methods related to obstacle detection sensors in low-visibility conditions by conducting obstacle detection experiments in a test space with low-visibility, and analyzing the conditions that affect safety performance.
Mid-term goals (FY2024)
- Establish core component of testing method by quantifying each property
- Develop prototype drones and methods for evaluating aerodynamic characteristics during individual aerodynamic effects
- Develop performance evaluation method for position estimation performance under low-visibility conditions
- Develop performance evaluation methods for obstacle detection sensors
Final goals (FY2026)
- Creation of evaluation procedures by consolidating results of items under 1
- Development of method for evaluating aerodynamic characteristics during combined aerodynamic effects
- Development of method for evaluating position estimation in environments with moving obstacles
- Development of test method capable of quantifying safety performance
-
")